
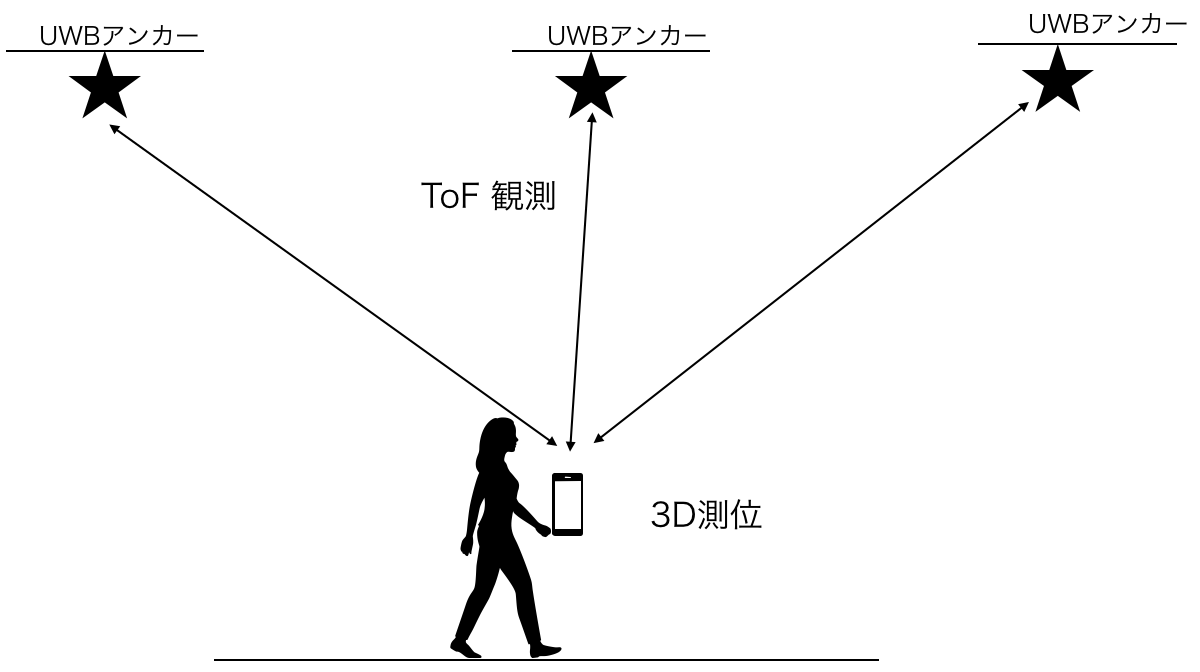
測位衛星(GNSS)の信号は、地下や屋内には届かないため、屋内用の位置検知システムが必要とされています。最近になって UWB (Ultra Wide Band) モジュールが市販されるようになり、無線で距離を高精度に測ることができるようになりました。複数のアンカー局からの距離を測ることができれば、3次元空間の測位が可能になります。しかし、観測した距離には雑音が含まれたり、外れ値が混ざったりして、測位精度が劣化することがあります。本テーマでは、測位精度向上のための測位演算やアンカー配置の最適化を行っています。
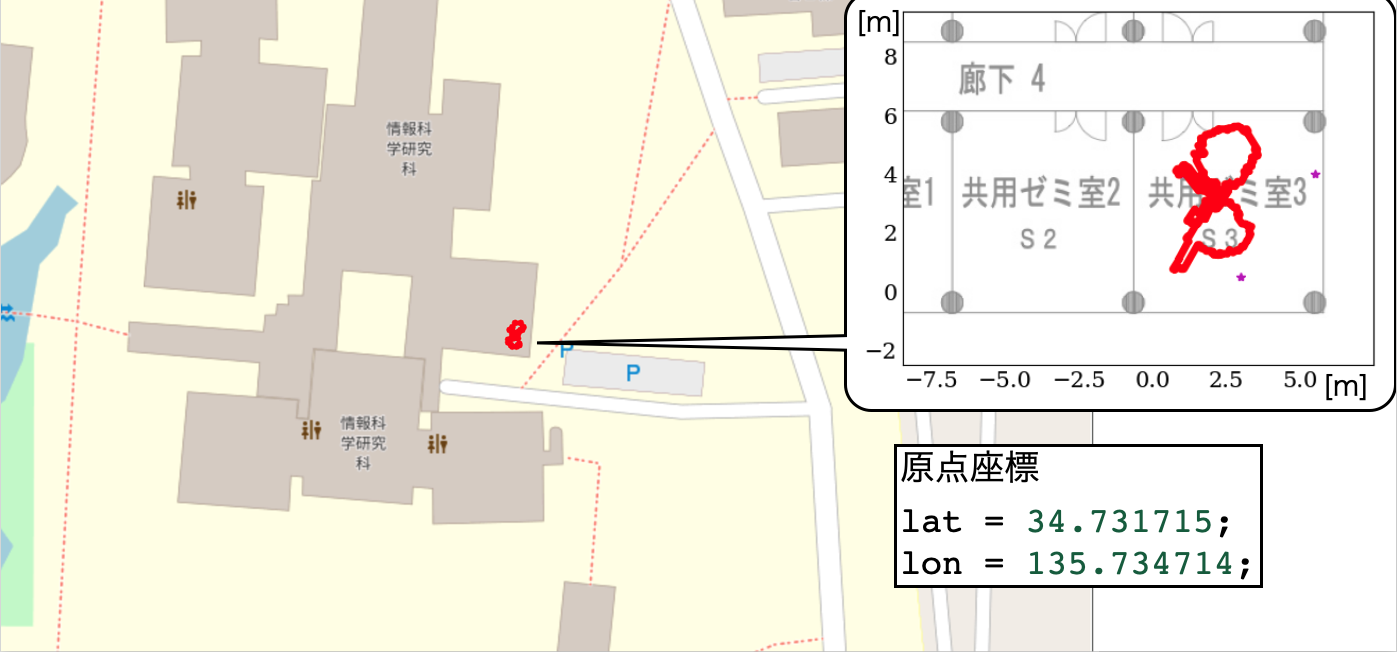
屋内でも“地球座標”で位置がわかる
GNSSで得られるグローバル座標に、UWBによる高精度な相対位置情報を融合。
これにより、これまで困難だった屋内環境でもGNSS座標の更新が可能になります。
下図のように、GNSS単独では実現できなかった高精度な屋内位置検知を実現します。
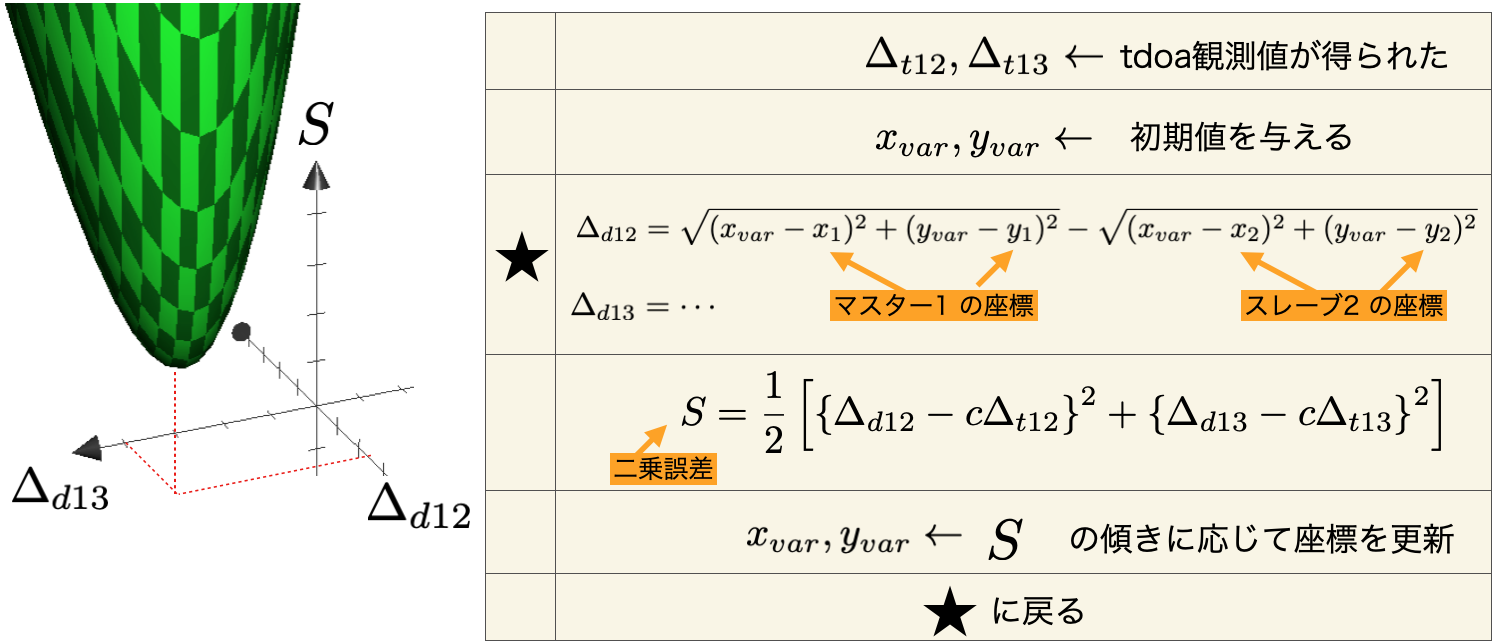
ガウス・ニュートン法 Gauss-Newton Method
ガウス・ニュートン法による解法では、位置が既知のアンカーから送信された信号を、位置が未知のタグが受取ります。信号には時刻の情報が含まれます。タグは、まず得られた到着時間差 (tdoa : time difference of arrival) に光速をかけた 距離差 を求めます。その後、任意の 初期座標 と得られた距離差との2乗誤差を求め、2乗誤差が小さくなるように座標を繰り返し修正します。収束と判断されれば繰り返しを終了し、大きな座標修正が行われたと判断されれば、その座標を破棄して次の観測値の処理へと移ります。以上のようにして、タグの座標を得ることができます。
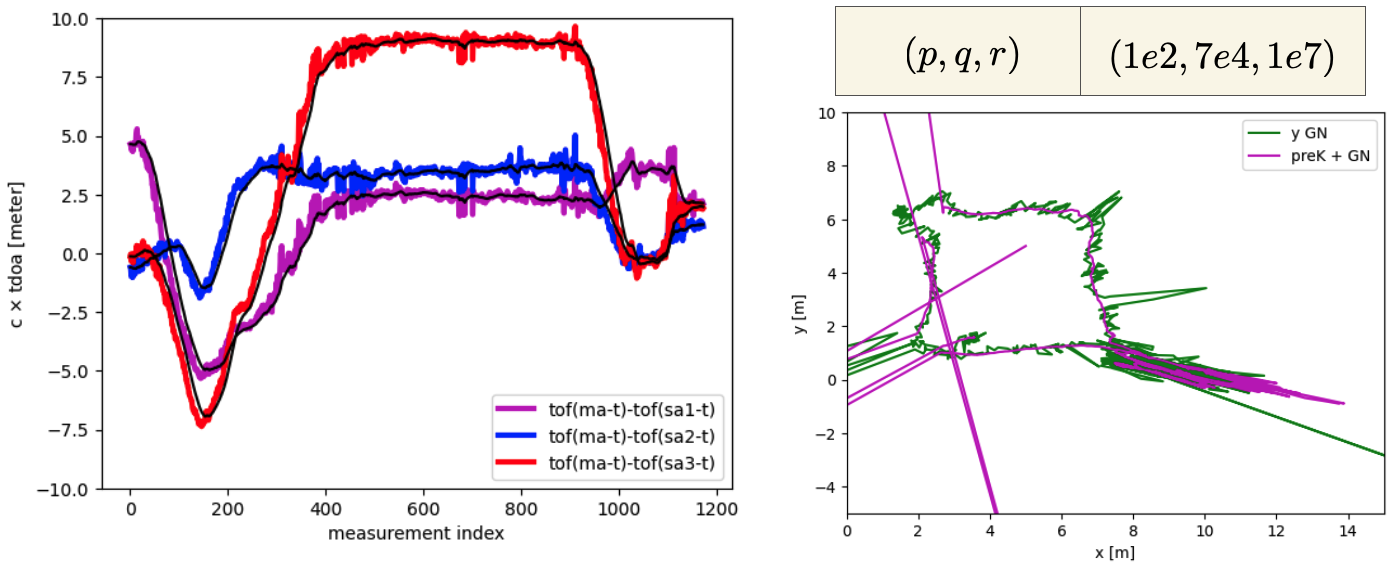
カルマンフィルタによるスムージング Smoothing using Kalman filtering
線形カルマンフィルタの適用例を紹介します。下の左図のように、観測した距離差の値に含まれる雑音には、統計的な分散量があり、その分散量を観測雑音の共分散行列として、あらかじめ設定しておきます。同時に、システム雑音の共分散行列も設定することで、適切なスムージングを実現できます。左図の黒線がカルマンフィルタ出力です。これを用いてガウス・ニュートン法で測位した結果が右図の紫線です。緑線は、ガウス・ニュートン法のみの適用結果です。緑に対して紫は滑らかであることが分かります。
メンバー
<教員>
東野武史 准教授 (higashino.takeshi@)
<学生>
M2 原田 harada.chisato.gy5@
メールアドレスは@の後に、naist.ac.jpを省略しています。